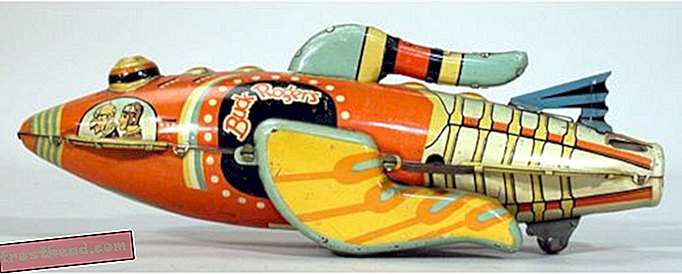
De nieuwe robot loopt over een oneffen oppervlak op een manier gemodelleerd naar een zebrastaarthagedis. Afbeelding afkomstig van Chen Li, Tingnan Zhang, Daniel Goldman
Het ontwerpen van een robot die zich gemakkelijk over los terrein kan verplaatsen, bijvoorbeeld een rover die bedoeld is om het oppervlak van Mars te doorkruisen, vormt een unieke technische uitdaging: wielen zakken vaak weg in wat ingenieurs 'stroombare grond' noemen (mengsels van zand, grond, modder en gras) ).
Gezien de vele biologisch geïnspireerde innovaties in robotica, had een team van onderzoekers van Georgia Tech het idee om een ontwerp te baseren op woestijnwezens zoals hagedissen met zebrastaart die in staat zijn over een los, zandig oppervlak te klauteren zonder te vertragen. Hun inspanningen lieten hen toe om dit kleine zesbenige apparaat te maken, gepresenteerd in een artikel dat vandaag in Science is gepubliceerd, dat over een korrelig oppervlak kan lopen op een manier die griezelig doet denken aan een reptiel.
Het onderzoeksteam, geleid door Chen Li, ontwierp het apparaat na het bestuderen van de voortbeweging van verschillende wezens en het wiskundig simuleren van de prestaties van verschillende soorten poten (variërend in aantal, vorm en lengte) in verschillende afzonderlijke omgevingen. Ze hopen dat hun onderzoek de ontwikkeling van een veld dat ze 'terradynamica' hebben genoemd, zal stimuleren - alleen omdat aerodynamica betrekking heeft op de prestaties van gevleugelde voertuigen in de lucht, zal hun veld de beweging van legged voertuigen op korrelige oppervlakken bestuderen.
Om hun robot te ontwerpen, gebruikten ze deze simulaties om de exacte beenlengtes, bewegingssnelheden en krachtniveaus te bepalen die apparaten over een los oppervlak zouden voortstuwen zonder dat ze te diep inzinken. Ze drukten vervolgens verschillende soorten poten af met een 3D-printer en bouwden robots om ze in het lab te testen.
Een van hun meest interessante bevindingen is dat dezelfde soorten ontwerpprincipes van toepassing zijn op voortbeweging op verschillende korrelige oppervlakken, waaronder maanzaad, glasparels en natuurlijk zand. Hun simulaties en praktijkexperimenten onthulden dat C-vormige benen over het algemeen het beste werkten, maar dat elk type boogvormige ledematen relatief goed werkte omdat ze het gewicht van het apparaat over lange (zij het smalle) beenoppervlakken spreiden als de benen komen in contact met de grond tijdens een pas.

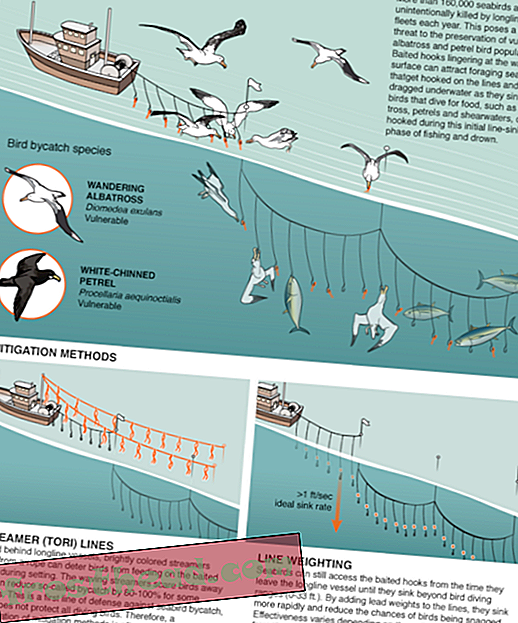
De onderzoekers ontdekten dat C-vormige ledematen het beste werken om snel over korrelige oppervlakken te bewegen, zowel in hagedissen als in robots. Gestippelde, solide en gestippelde afbeeldingen in C en D zijn vroege, middelste en late beenposities tijdens een pas. Pijlen geven bewegingsrichtingen aan voor specifieke beengebieden. Afbeelding via Science / Li et. al.
De toepassingen van dit soort onderzoek zijn breed: deze specifieke robot, zeggen de onderzoekers, zou kunnen worden ontwikkeld tot een nuttig zoek- en reddings- of verkenningsapparaat, terwijl de principes die zijn afgeleid van het veld van terradynamica nuttig kunnen zijn bij het ontwerpen van sondes om andere te verkennen planeten in de toekomst. Ze kunnen biologen ook helpen om beter te begrijpen hoe levensvormen hier op aarde zijn geëvolueerd om zich over het oppervlak van onze planeet te verplaatsen.